











研究人员设计全铰接3D打印手指假肢

中指和无名指的硅胶美容修复,肤色与受试者相匹配。
尽管目前可以使用的假肢范围很广,但部分手部缺失的患者常常被冷落,并且由于灵活性的显著丧失,残疾往往是极具挑战性的。来自科罗拉多大学和莱斯大学的研究人员旨在通过一种完全铰接的手指假肢的新设计来改变这一点,其中包括一个独立的执行器。该项目和随后的测试在他们最近发表的论文《为部分手部缺失的人设计和评估具有独立传输功能的远端驱动动力手指假体》中有详细介绍。
研究团队利用直接激光金属烧结(DMLS)为手指的内侧指骨部分创建了一个齿轮传动装置。然后变速器与直流电机连接,允许扭矩通过PIP接头传输。这种新设计的特点是自动化设备,就像25-50%女性的食指大小一样。虽然这是一个平均尺寸,但未来可能有其他截肢者的尺寸。为了获得适当的平衡和“假肢作为残肢上的外部载荷的感知”,科学家们设计了一个像人的手指一样的重量。
研究人员表示,“手指指骨和欠驱动机制形成一个六连杆,基本上是两个四连杆的叠加,通常用于降低双指骨商业和研究设备。连杆系统连接每个IP关节的运动,以提供适合ADL中使用的各种抓握的弯曲轨迹。”
测试的重点是评估指尖的力和屈曲度,使用Maxon Motors的12V的Escon 24/2控制器和24 V的Futek LSB200称重传感器,以不同的角度连接指尖。 研究人员还使用Quanser Q8-USB数据采集板,使用MATLAB / Simulink收集以下信息:
•收集的称重传感器力
•电机电流消耗
•电压
在评估假肢手指的力量时,研究人员将称重传感器定位在指尖的接触点内,同时控制器驱动电机将手指驱动到称重传感器。之后,研究人员设置了以下步骤:
1.检测到脉冲负载后,电机通电0.5秒。
2.记录了保持力。
3.移动称重传感器接触指尖以测量屈曲速度。
4.弯曲速度是通过“将手指接触称重传感器从其完全伸展位置接触的时间除以手指的角位移来确定的。”
研究人员重复试验了15次。当他们开始评估各个齿轮阶段时,团队意识到需要进一步检查以评估面齿轮对传动效率的贡献。手指的力学也需要更多的验证,以及进一步的疲劳测试。

将Vincent手指安装到患者身上。注意前臂上电池和电极的位置。
研究人员总结说:“目前对动力指的研究已经导致了更紧凑和更高的减速传动,未来的工作将包括对传动效率的更仔细评估,以确定使用面齿轮的好处以及行星齿轮级结构的变化。”‘除了对齿轮抛光过程进行更彻底的检查外,在减少必要的齿轮级数量的同时,增加变速箱整体减速的替代齿轮也很有意义。
工作还将包括对残肢附着体的改进,更好地适应MCP远端截肢的个体,以及对运动连杆系统的鲁棒性和解剖运动的改进。即将到来的手指迭代还将包括改进其在反对和安全机制中的性能,以在极端或意外的负载情况下保护组件。”
3D打印在假肢领域赢得了一个光荣的利基,无疑地改变了许多人的生活,从帮助退伍军人的假肢,到两栖四肢,到乳房切除术患者的假体乳房。
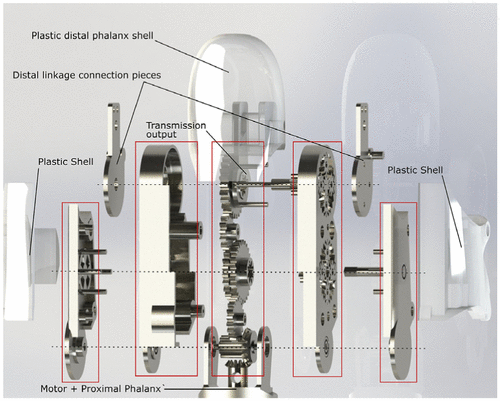
内侧指骨齿轮传动分解图。矩形中的部分是不同的薄片。左侧和右侧内齿板包含行星级,并包围中央齿板中的正齿轮/伞齿轮级。外椎板与近端指骨相连,并包围载具。齿轮传动的输出与远端的指骨相连。
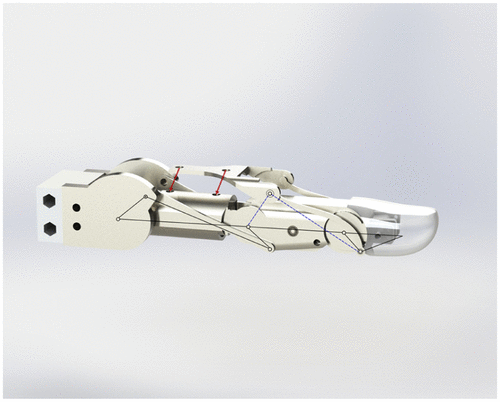
绘制动力手指的钢部件与运动连杆系统概述。虚线表示包含链接的括号已升高以显示方向。在箭头所示的位置,用两个固定螺钉将支架固定到近端指骨。为了清晰起见,没有显示包围整个手指机构的中空塑料外壳。